






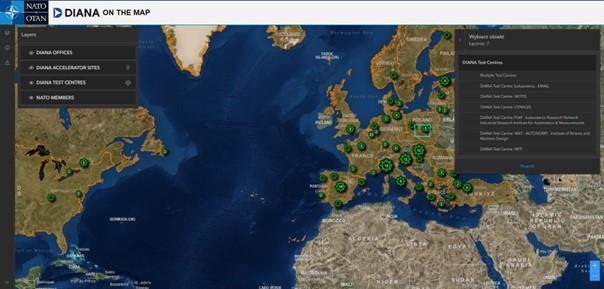
 Akcelerator Innowacji Obronnych NATO (DIANA) rozwija się!Aktualności13 marca 2024W czwartek (14 marca 2024 r.) natowski Akcelerator Innowacji Obronnych dla Północnego Atlantyku (DIANA) ogłosił znaczące rozszerzenie swojej transatlantyckiej sieci
Akcelerator Innowacji Obronnych NATO (DIANA) rozwija się!Aktualności13 marca 2024W czwartek (14 marca 2024 r.) natowski Akcelerator Innowacji Obronnych dla Północnego Atlantyku (DIANA) ogłosił znaczące rozszerzenie swojej transatlantyckiej sieci HarSval – nowy projekt realizowany z wykorzystaniem infrastruktury CENAGISAktualności1 marca 2024Wraz z początkiem marca 2024 roku rozpoczyna się realizacja projekt bilateralny pt. „HarSval Bilateral initiative aiming at Harmonisation of the Svalbard cooperation”. Projekt
HarSval – nowy projekt realizowany z wykorzystaniem infrastruktury CENAGISAktualności1 marca 2024Wraz z początkiem marca 2024 roku rozpoczyna się realizacja projekt bilateralny pt. „HarSval Bilateral initiative aiming at Harmonisation of the Svalbard cooperation”. Projekt XI Posiedzenie Rady Sieci Naukowej Analiz GeoprzestrzennychAktualności15 grudnia 2023W dniu 15 grudnia 2023 roku odbyło się w ośrodku Politechniki Warszawskiej w Józefosławiu XI Posiedzenie Rady Naukowej Sieci Naukowej Analiz Geoprzestrzennych. Posiedzenie
XI Posiedzenie Rady Sieci Naukowej Analiz GeoprzestrzennychAktualności15 grudnia 2023W dniu 15 grudnia 2023 roku odbyło się w ośrodku Politechniki Warszawskiej w Józefosławiu XI Posiedzenie Rady Naukowej Sieci Naukowej Analiz Geoprzestrzennych. Posiedzenie